#include <vee_polygon.h>
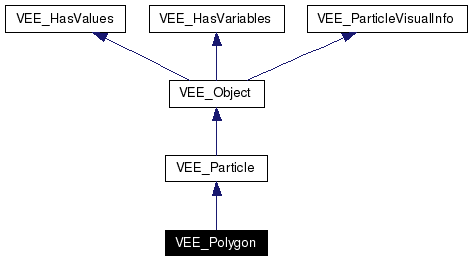
Inheritance diagram for VEE_Polygon:
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||
|
Receive and process a value. Parameters:
Reimplemented from VEE_Particle. |
|
|
Reimplemented from VEE_Particle. |
|
||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||
|
|
|
|
Set default links based on m_indices.
|
|
|
Calculate optimal distances based on present vertex array.
|
|
|
Get forces acting on this objects and add these vectors to velocity.
Reimplemented from VEE_Object. |
|
|
Update the location of this object.
Reimplemented from VEE_Particle. |
|
|
|
|
|
|
|
|
|
|
|
Reimplemented from VEE_Particle. |
|
|
|
|
|
Set vertices, indices and initialize default links.
|
|
|
Set links. Input consists of pairs of indices. Tensions are evaluated only on the defined links.
|
|
|
Reimplemented from VEE_ParticleVisualInfo. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 1.4.6
1.4.6